

ピックアンドプレースを1軸で。
機械の構成を考える上での一般的な動作に〝ピックアンドプレイス(Pick and Place)〟というのがあります。 コンベアなどでの同じ搬送上での移動ではなくて、例えば、ある地点Aにあるワークをピックアップ(持ち上げ)して、別のある地点Bへ移動するという場合などがそれです。 製品を加工する機械や加工ラインなどではよくある動作です。
この時、一般的に考えられるのが、〝持ち上げる(垂直)方向〟と〝移動する(水平)方向〟の2つの駆動(2軸)を使った方法です。 もしくは、ロボットアームを利用するような方法などもありますよね。 近頃は、それが一般的なのかもしれませんが… ボク的には安直すぎてちょっと。(^_^;)
ありきたりでは、なんだか…
色んな方法があると思うのですが、以前、うちが採用していた方法は、垂直・水平用の2軸を使った方法でした。(下図)
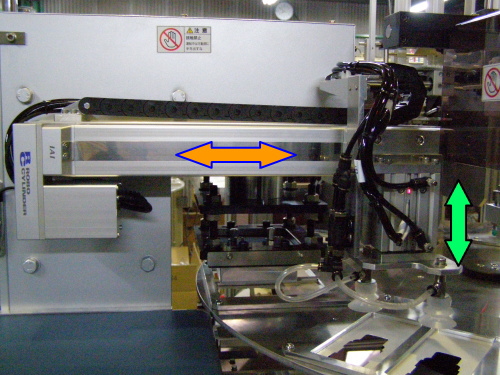
オーソドックスな方法で、手っ取り早くもあり、特に問題はなかったのですけど… ある時、ふと、

これって、
もっとシンプルにできないもんかな?
なんて言う感情がふつふつと湧いてきたんです。
よくよく考えてると、2軸使っているということは、当然2軸用のアクチュエータ(器材)が必要になって、で、それぞれに対してセンサーなども必要になって、それに伴って配線とか配管も必要になってくるってことで。
何だか、無駄なことをやってるんじゃないのか… って。
頭に浮かんだシンプルな方法。
構造的な部分や機構(メカニズム)的な部分の構想を膨らませて、考えて… 考えて… 降りてきたイメージが〝平行四辺形〟だったんです。 つまり、〝リンク機構〟でなんとかならんのか? という発想。 紙ベースで模型を作ってみて、メカニズム的にイケそうだったんで、採用しました!
動画で。
動作を動画でご覧いただけます。 動きのデモなので手動で突いてます。w
停止位置のコントロールをしたかったので駆動には単軸ロボットを採用しました。 実際の取り付けは上下反転になります。
実装部分の動画
実際に実装した部分の動画をご覧ください。 40秒後の後半部分が、このメカニズムでのユニット動作になっています。
ご相談、お問合せはお気軽にどうぞ。









