

最初は散々だった…
たくさんのグリップコンベアを創ってきたのですが、最初からうまくできたわけではなかったんです。 初期の頃のユーザーさんには、大変申し訳ない気持ちでいっぱいなんですけども…
備忘録的に、過去からの変遷をつづりたいと思います。
初めての…。 1st ED
一番最初に作ったグリップコンベアは、〝2本のベルトで挟む〟ということだけしか思ってなくて… その構造をものすごく安直に捉えていたんです。 単純にいうと、平ベルトコンベアを立て使いして、それを2本並べたらできるやん! みたいなね。 それでいて、デザインはちょっと凝ったという…
コンベアへの実績はあるにはあったのだけど、この頃はまだ知識が乏しくて。 モータには、インダクションモータを使って、でも、インダクションってコンパクトなサイズではないので、配置した時の上へのでっぱりが嫌だったこともあり、直交タイプのギアを使ったモータにしたんです。 で、予算的な面で言えば、『平ベルトを2本並べて』っていう感覚だから、そんなに取ってなくて… 出来たものに対して色んな手間がかかってしまって、なので、めちゃ赤。 苦笑


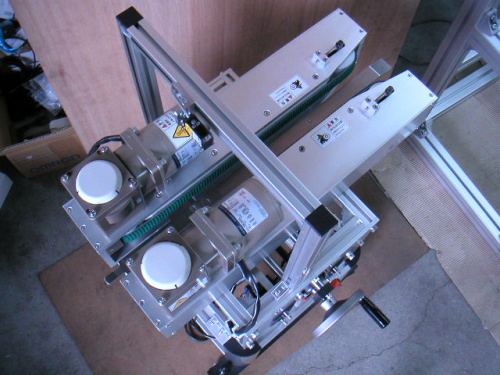
トリガー用のセンサーは、この頃は、フレームを門型に組んでそこに設置するという。 今じゃ、考えられないんだけど。(^_^;)
ちなみに、この当時は、『抱き込みコンベア』という名前で呼んでいました。
次のも… 2nd ED
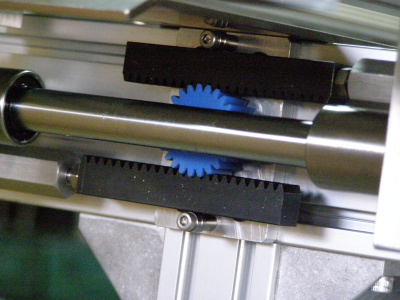
次のオーダーを頂いたときは、フレームの形状を少し変えてみました。 グリップコンベアって、『挟む』機構がいるのですけど、そこも少し改良を加えてみました。 ラック・ピニオンのギアを使って、拡縮させる(挟む)という感じです。
でも… この時も依然として、インダクションな汎用モーター仕様。 で、且つ、予算の関係で『パックインモーター』というスピードコントローラ内蔵のタイプのモーターを使いました。 おかげで余計に、調整がしずらいというね…


ようやく… 3rd ED
汎用のインダクションモーターでの反省を元に根本的にモーターを見直したのが、この時のグリップコンベアです。 モーターの資料を漁って、たどり着いたのが、『ブラシレスDCモーター』という選択。 たぶん、この当時、この手のコンベアへの採用は珍しかったと思います。 なんせ、汎用に比べると、単価がねぇ。w それでも、調整に係る時間を考えると全然違ってて、ということは、つまり、お客さんの側でも同じだということですよね。
ほんと、過去のユーザーさんには申し訳ない…


カバーリングを変更。 4th ED
ブラシレスDCモーターの良さに気づいてからは、以後はそれを標準に据えました。 しかし、この時のグリップコンベアはカバーリングに手を加えたくらいで、3rdを引きづったまま…


衝撃に備える。 5th ED
次のブラッシュアップがフレームの構成。 ワークグリップ時に起こる「衝撃」を緩和すべく、工夫をいれました。 ブラシレスDCモーターにも、より使い勝手のいい新型がでて、それを採用しました。

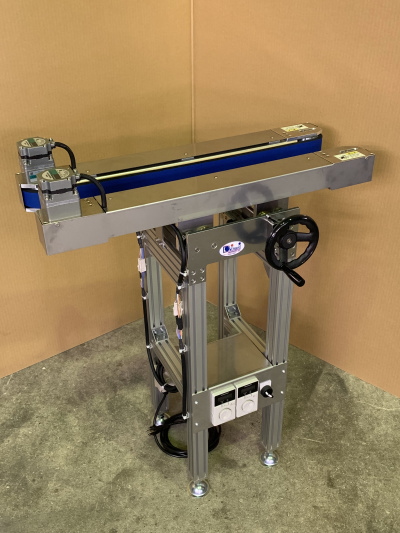
衝撃に備える… 第2段階。 6th ED
5th ED の時の〝衝撃に備える〟ではクランプレバーで固定するという方法で対応したのですけど、正直、この時は、急場で凌いだという感じ。 固定はできるものの、クランプレバーの操作が必要になるため、ロックし忘れると… という問題があるのは否めなかったのです。 で、そこをもう少し見直したのが、6th。 より安定したグリップが行えるよう、グリップを行う要(カナメ)の拡縮機構も見直しを図っています。


操作位置の見直し。 7th ED
基本的に、産業用インクジェットを使った底面への印字での使用になるということを考えた時、スイッチ系統が上の方だとプリントヘッドのアクセスが少しやりづらい… という難点がありました。 そこを改良したのが、7th EDです。


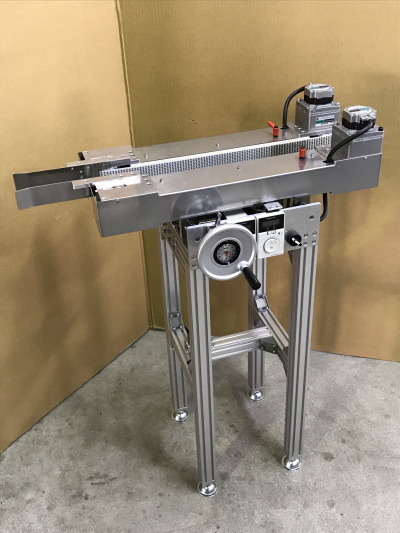
最終形態。 8th ED
7th ED で、スイッチ系統を下部へ移動したのですが、この位置ではインクジェットのインク漏れのリスクがあり、コントローラへのダメージは否めず… というわけで、コントローラ取り付け時への工夫を施したのが、8th ED です。 これがほぼ最終形態になりました。
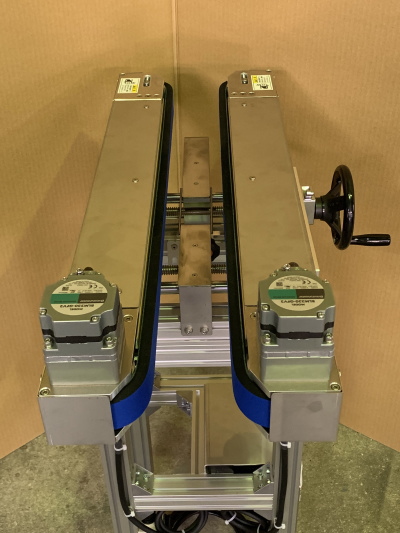
基本的には変わっていないのですが、その後の変更点と言えば、モーターの仕様です。 ケーブル引き出しタイプのモーターを使用していたのですが、ここ最近では、コネクタタイプのモーターに変更しています。 これにより、モーター取り付け部分でのケーブルの取回しがすっきりした感じになっています。
ポジションメータの件。
当初、ワークが変ったとしても、グリップ時の位置がわかれば再設定がしやすいだろう… ということで、ポジションメーターやインディケータなどといった表示器を採用していました。 が… 結局のところ、表示を行ったとしても、現物を使って挟み具合や力加減の調整を行うことから、表示器はいらないのでは? という結論に達しました。
また、表示器などをつけると、〝その数字を追う〟という「人の特性」というか、習性がでてしまうんですよ。 実際の状態がどうであれ、数字の方が正しい!という風になってしまうキライがあるんです。 それによって、ミスがでるのも本末転倒になってしまう。
などということも鑑みて標準的には未装着にしています。 むろん、『表示は欲しい!』と言われる場合には対応可能です。
ご相談、お問合せはお気軽にどうぞ。









